多边形分割成若干凸多边形(NavMesh的初步形成)
本文基于 Arkin, Ronald C.的论文 “Path planning for a vision-based autonomous robot”.Path planning for a vision-based autonomous robot Computational Geometry in C orourke-compc
现任佐治亚理工教授 Ronald C. Arkin,在1986年时发表了一篇叫做Path planning for a vison-based autonomous robot的报告,隶属robotics领域。文章提出了Meadow Map的方法以长时间存储地图。Meadow Map为现代Navmesh系统的雏形,提出了以下核心观点 :
在本文中,我们主要探讨:通过Arkin教授的方法去实现给定一个任意多边形,得到其分割而成的若干凸多边形。
方法步骤:
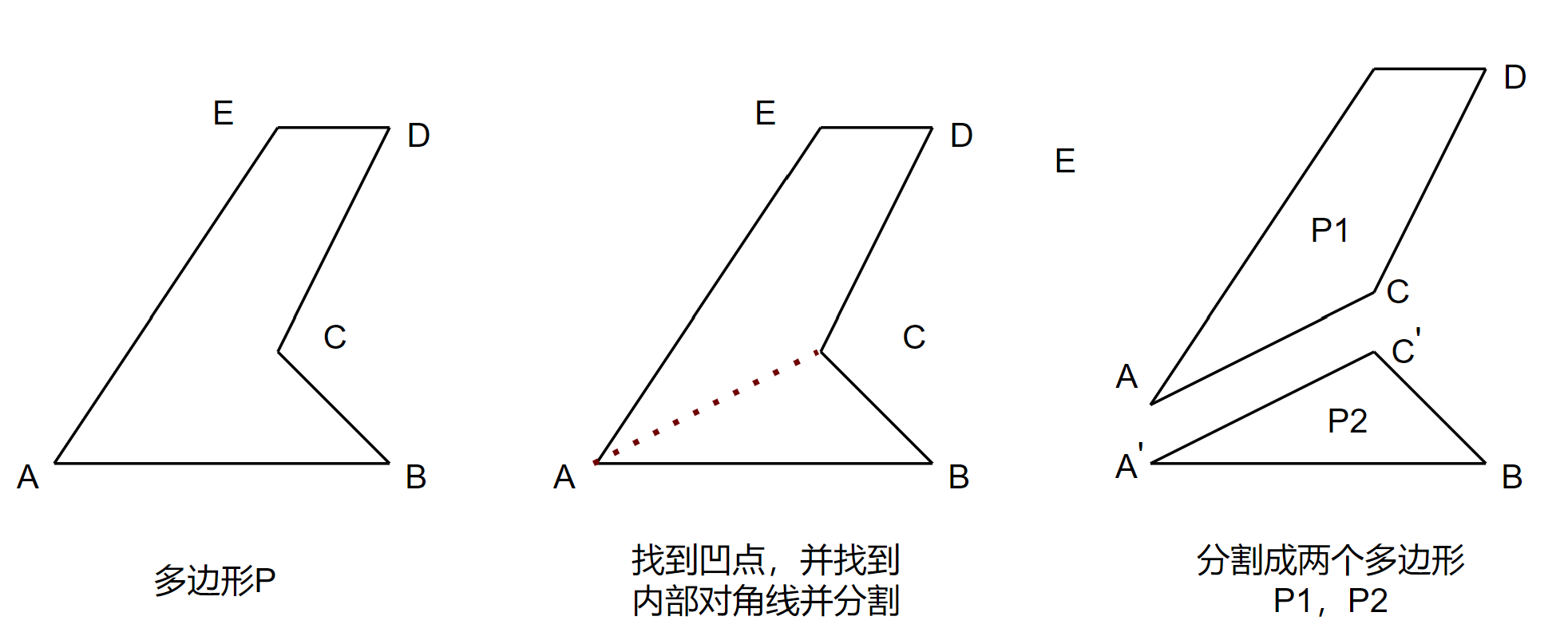
对于现有的多边形$P$,若其为凸多边形,则结束,否则进入步骤2
在$P$中找到一个凹 的点,如图中点$A$
由点$A$去找一个同在$P$中的另一不相邻点,如图中$D, E, H$等
选择其中一个完全在$P$内部 的线段,用于将$P$分割成两个子多边形$P_1, P_2$
对$P_1, P_2$做同样的操作
完全在$P$内部 (例如图中线段$AD$)的判断方式:
在角的内侧(对于$AD$来说就是要在$∠JAB$和$∠CDE$的内侧)
不与任何一条非相邻边相交(对于$AD$来说就是不与$AJ, AB, DC, DE$以外的边相交)
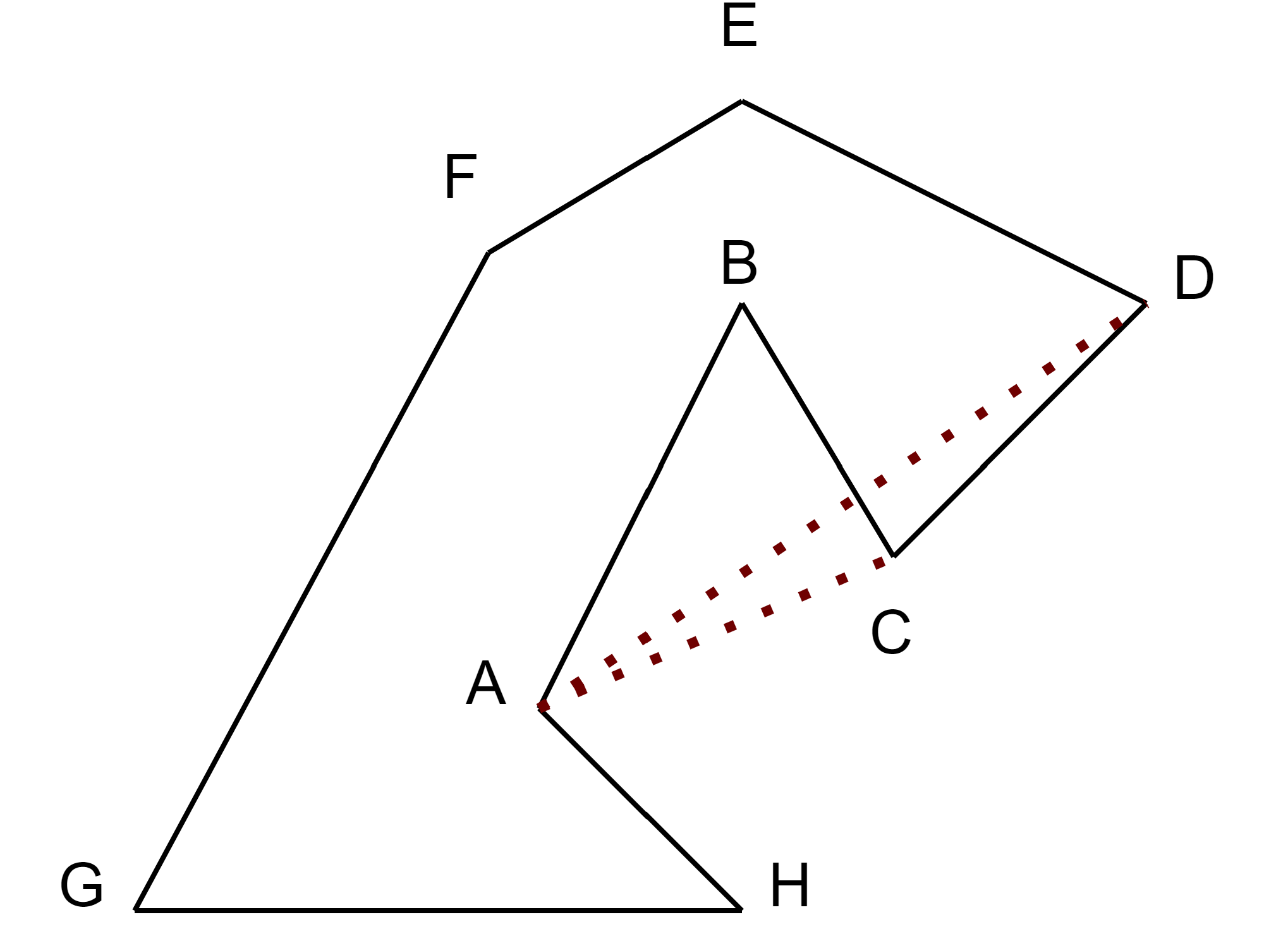
在上图中,线段$AG, AH$都是反例,要被排除掉,我们可以在$AC, AD, AE, AF$中选择一条去分割多边形$P$。
关于在角的内侧,可以看这张图:
图中对角线$AC$位于$∠HAB$和$∠BCD$外侧,而对角线$AD$位于$∠HAB$外侧和$∠CDE$内侧。
对于这个算法来说,其难点就在于:1. 如何找到一个凹的点,2. 如何找到一个完全在内部的对角线。
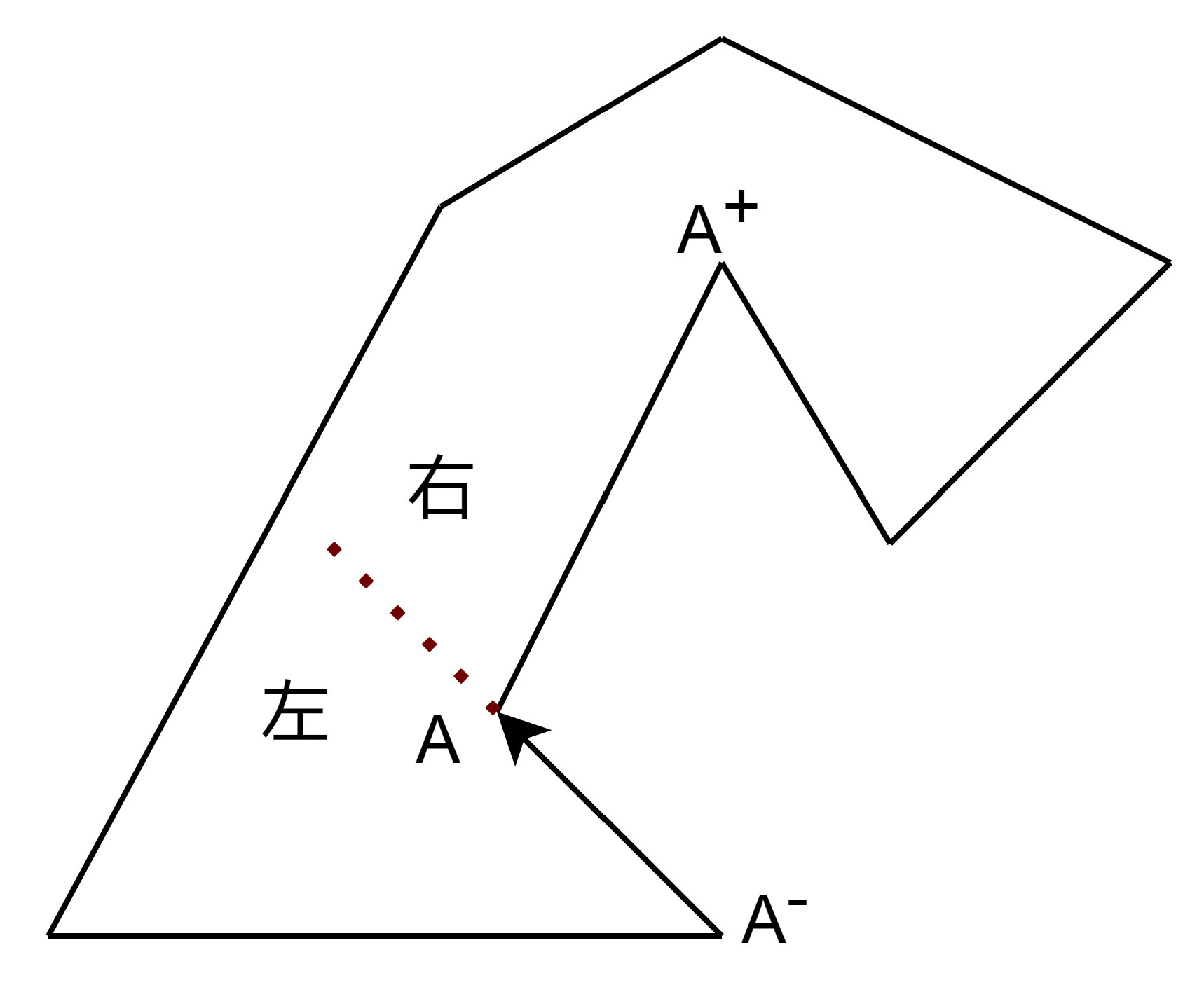
1. 如何找到一个凹的点 我们按照逆时针顺序枚举多边形$P$上的顶点,如下图。当我们枚举到点A时,记录其上一个节点为$A^-$,其下一个节点为$A^+$。通过判断$A^+$与 $\boldsymbol{A^-A}$ 的关系,当$A^+$在$\boldsymbol{A^-A}$的右侧时,则说明点$A$是一个凹的点。
我们可以通过向量的叉积来进行左右方向的判断,设$\boldsymbol{A^-A} = (x_1, y_1), \boldsymbol{A^-A^+} = (x_2, y_2)$ 则$\boldsymbol{A^-A} \times \boldsymbol{A^-A^+} = x_1y_2 - x_2y_1$ 。这是一个在$z$轴上的向量,即$(0, 0, x_1y_2-x_2y_1)$。当$A^+$位于$\boldsymbol{A^-A}$左侧时,$x_1y_2-x_2y_1>0$,否则$x_1y_2-x_2y_1<0$,当$A^+$于$\boldsymbol{A^-A}$共线时,$x_1y_2-x_2y_1=0$
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 private static int AreaSign (Vector2 a, Vector2 b, Vector2 c ) Vector2 ab = b - a; Vector2 ac = c - a; float area = ab.Cross(ac); if (area > EPS) return 1 ; else if (area < -EPS) return -1 ; else return 0 ; } public static float Cross (this Vector2 a, Vector2 b return a.x * b.y - a.y * b.x; } public static bool Left (Vector2 a, Vector2 b, Vector2 c ) return AreaSign(a, b, c) > 0 ; } public static bool LeftOn (Vector2 a, Vector2 b, Vector2 c ) return AreaSign(a, b, c) >= 0 ; } public static bool Collinear (Vector2 a, Vector2 b, Vector2 c ) return AreaSign(a, b, c) == 0 ; }
2. 如何找到一个完全在内部的对角线 对于一个凹的顶点$A$,我们要逐个枚举多边形$P$中不与$A$相邻的其他顶点,然后判断其连线是否是1. 在角的内侧,2. 不与任何非相邻的边相交。
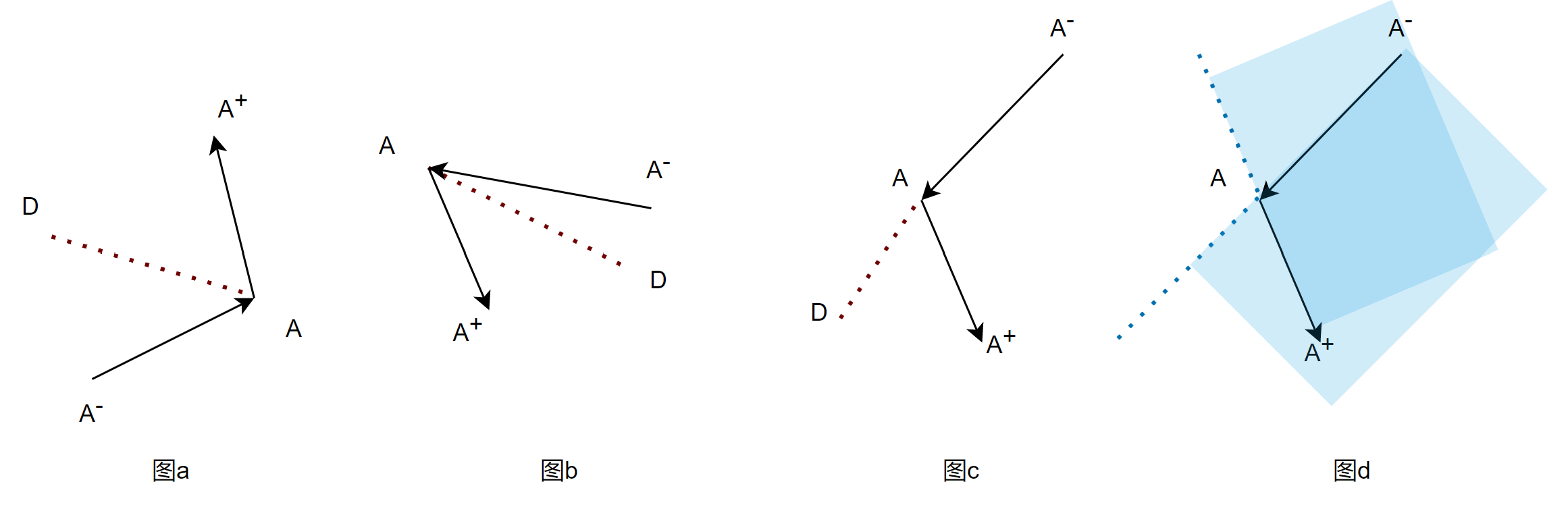
判断是否在角的内侧 如下图a、图b,当$∠A^-AA^+$是个劣角(即小于180°的角)时,要判断$AD$是否在角内部,仅需保证$D$同时在$\boldsymbol{A^-A}$和$\boldsymbol{AA^+}$的左侧。(这里一定要注意我们$A^-,A,A^+$是逆时针排列的)
对于图c,$AD$在$\boldsymbol{A^-A}$的左侧,但是在$\boldsymbol{AA^+}$的右侧,故而其在角的外侧。
在图d中,我们可以看到两个浅蓝色框分别代表$\boldsymbol{A^-A}$和$\boldsymbol{AA^+}$的左侧,则重叠的深色区域就是勇仕在两个向量的左侧的区域,即角的内侧。
那当$∠A^-AA^+$为优角(即大于180°小于360°的角)呢?其实可以反向思考以下,这个时候如果$AD$在$∠A^-AA^+$对应的劣角中,岂不就说明$AD$在优角$∠A^-AA^+$外侧了?
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 public static bool InCone (Vertex a, Vertex b ) Vertex a0 = a.Prev, a1 = a.Next; if (LeftOn(a0.Position, a.Position, a1.Position)) { return Left(a.Position, b.Position, a0.Position) && Left(b.Position, a.Position, a1.Position); } return !(LeftOn(a.Position, b.Position, a1.Position) && LeftOn(b.Position, a.Position, a0.Position)); }
在上述代码中,引入了一个新类型Vertex,其定义如下:
1 2 3 4 5 6 public class Vertex { public Vector2 Position; public Vertex Prev; public Vertex Next; }
目的是将多边形$P$的所有顶点,逆时针方向连接起来。
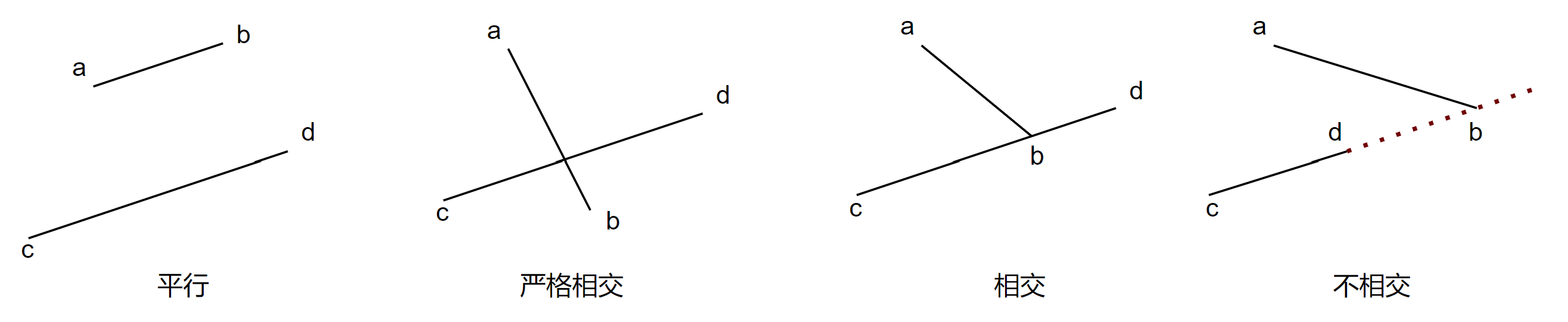
判断是否与其他边相交 我们先来看一下两个线段的位置关系都有哪些,如下图:
对于严格相交 这种情况,我们只需要确保$a, b$在线段$cd$的两侧,并且$c, d$在线段$ab$的两侧即可。如何判断两侧?这就又回到刚才我们判断点在向量左右那一步了,我们可以直接调用刚才写好的Left方法。
对比相交 和不相交 这两种情况,其区别是三点共线时,共线的点是不是在线段上,即当$bcd$三点共线时,要保证$b$ 位于$cd$之中,就也属于相交的情况。而三点共线也可以直接用刚才写好的Collinear()方法,我们需要再写一个Between()方法去判断当Collinear()满足时,是否满足$b$ 位于$cd$之中这种情况。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 public static bool IntersectStrictly (Vector2 a, Vector2 b, Vector2 c, Vector2 d ) if (Collinear(a, b, c) || Collinear(a, b, d) || Collinear(c, d, a) || Collinear(c, d, b)) return false ; return (Left(a, b, c) ^ Left(a, b, d)) && (Left(c, d, a) ^ Left(c, d, b)); } public static bool Intersect (Vector2 a, Vector2 b, Vector2 c, Vector2 d ) if (IntersectStrictly(a, b, c, d)) return true ; if (Between(a, b, c) || Between(a, b, d) || Between(c, d, a) || Between(c, d, b)) return true ; return false ; } public static bool Between (Vector2 a, Vector2 b, Vector2 c ) if (!Collinear(a, b, c)) return false ; if (a.x == b.x) return (a.y <= c.y && c.y <= b.y) || (b.y <= c.y && c.y <= a.y); else return (a.x <= c.x && c.x <= b.x) || (b.x <= c.x && c.x <= a.x); }
解决了这两个问题后,我们可以用以下代码,解决问题:[[#2. 如何找到一个完全在内部的对角线]]
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 public static bool DiagonalWithoutIntersect (Vertex a, Vertex b ) Vertex current = a.Next; while (current.Next != a) { Vertex next = current.Next; if (current != a && current != b && next != a && next != b && Intersect(current.Position, next.Position, a.Position, b.Position)) return false ; current = next; } return true ; } public static bool Diagonal (Vertex a, Vertex b ) return InCone(a, b) && InCone(b, a) && DiagonalWithoutIntersect(a, b); }
递归求解 由于我们的Vertex类型中记录了点的前驱Prev和后继Next,所以其实我们只需要拿到多边形中的任意一个点,就可以不断地通过Next获取到多边形中所有的顶点。所以我们可以定义如下多边形polygon类型:
1 2 3 4 5 6 7 8 public class Polygon { public Vertex StartVertex => _startVertex; private Vertex _startVertex; #region Methods... }
然后定义方法Split()去不断的完成本文最开头的5条方法步骤。不过在这里还有几个细节要处理。
可以看到,在以$AC$为对角线,分割$P$为$P1,P2$后,需要补充两个点$A^\prime,C^\prime$。这一部分主要是各种链表的操作(因为我们用Prev,Next等将Vertex连接起来,其实就是一个双向循环链表)。在如下代码中,我标注了每个变量对应上图中的点,方便对照看去理解。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 public List<Convex> Split ( List<Convex> convexList = new List<Convex>(); Vertex concave = FindConcaveVertex(); if (concave == null ) { convexList.Add(new Convex(this )); return convexList; } else { Vertex splitVertex = null ; Vertex current = _startVertex; do { if (BasicOperations.Diagonal(current, concave)) { splitVertex = current; break ; } current = current.Next; } while (current != _startVertex); if (splitVertex == null ) { return null ; } Vertex splitVertexNext = splitVertex.Next; Vertex concavePrev = concave.Prev; splitVertex.Next = concave; concave.Prev = splitVertex; Vertex suppliedSplitVertex = new Vertex(splitVertex.Position); Vertex suppliedConcave = new Vertex(concave.Position); suppliedSplitVertex.Prev = suppliedConcave; suppliedConcave.Next = suppliedSplitVertex; suppliedSplitVertex.Next = splitVertexNext; splitVertexNext.Prev = suppliedSplitVertex; suppliedConcave.Prev = concavePrev; concavePrev.Next = suppliedConcave; Polygon childPolygon1 = new Polygon(concave); Polygon childPolygon2 = new Polygon(suppliedConcave); convexList.AddRange(childPolygon1.Split()); convexList.AddRange(childPolygon2.Split()); } return convexList; }
这里我们引入了一个新类型Convex表示凸多边形。当然我们可以让Convex类继承自polygon,不过我们并不需要Convex包含太多方法(例如Split()等),故而我们单独开一个类表示它。
1 2 3 4 5 6 public class Convex { public Vertex StartVertex => _startVertex; private Vertex _startVertex; }
孔洞的处理 到此为止其实我们已经可以很好的将一个任意多边形分割成若干凸多边形了,但是我们忽略了一个很重要的事,就是中间有孔的多边形应该怎么处理?
对于孔洞的处理算法,来源于 Recast Navigation
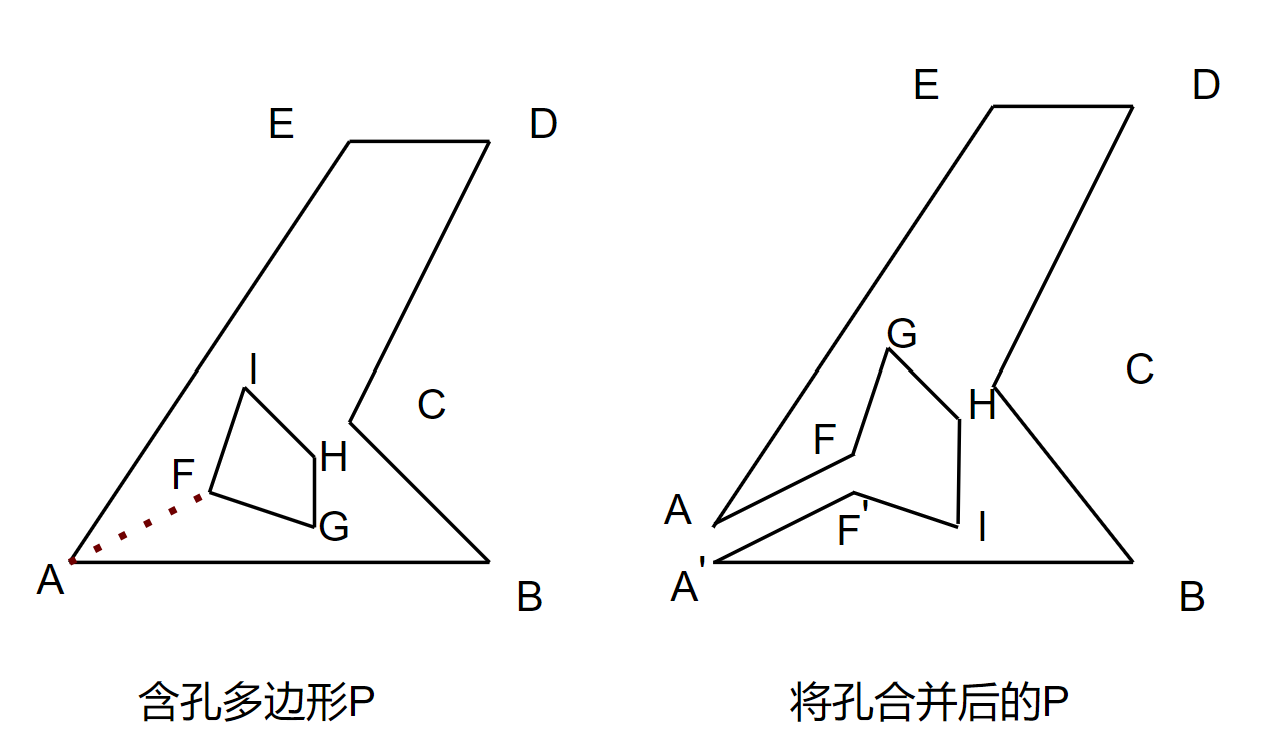
首先孔也是一个多边形,我们记为$Hole$ 。
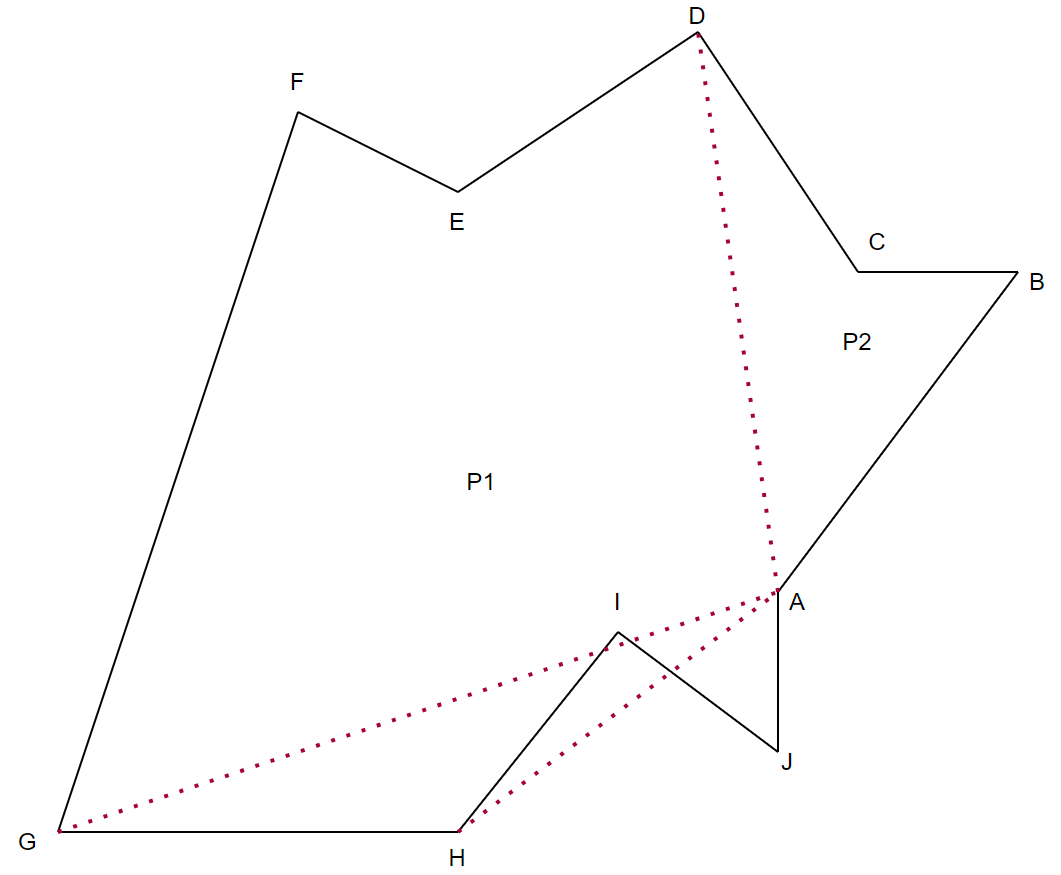
在$Hole$中选择一个顶点(如下图$F$)
在$P$上选择一个顶点(如下图$A$),且$AF$不与$P$或$Hole$上的任意非$A, F$相邻边相交
不合法的选择,例如$FC$,会与$Hole$上的边$IH$相交;例如$GD$,会与$P$上的边$BC$相交。
沿着选择的连线(如上图$AF$),将$P$与$Hole$融合
这里要时刻记住我们的多边形,顶点都是按照逆时针顺序连接的,$Hole$也不例外。然而当我们融合时,需要顺时针将$Hole$上的顶点添加到$P$中,这样得到的$P$的顶点才满足逆时针连接的条件。所以这里我们需要经过一个类似反转链表的过程。当然和之前相同的,这里我们也需要补充两个点$A^\prime,F^\prime$。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 public void MergeHole (Polygon hole ) if (!HasInnerPolygon(hole)) return ; bool hasFound = false ; Vertex linkVertPoly = null , linkVertHole = null ; Vertex holeVertex = hole.StartVertex; do { Vertex vert = StartVertex; do { if (BasicOperations.DiagonalWithoutIntersect(vert, holeVertex) && BasicOperations.DiagonalWithoutIntersect(holeVertex, vert)) { linkVertPoly = vert; linkVertHole = holeVertex; hasFound = true ; break ; } vert = vert.Next; } while (vert != StartVertex); if (hasFound) break ; holeVertex = holeVertex.Next; } while (holeVertex != hole.StartVertex); if (hasFound) { Vertex linkVertPolyNext = linkVertPoly.Next; linkVertPoly.Next = linkVertHole; Vertex linkVertHolePrev = linkVertHole.Prev; linkVertHole.Prev = linkVertPoly; Vertex prev = linkVertHole, current = linkVertHolePrev; while (current != linkVertHole) { Vertex currentPrev = current.Prev; prev.Next = current; current.Prev = prev; prev = current; current = currentPrev; } var suppliedLinkVertHole = new Vertex(); suppliedLinkVertHole.Position = linkVertHole.Position; suppliedLinkVertHole.Prev = prev; prev.Next = suppliedLinkVertHole; var suppliedLinkVertPoly = new Vertex(); suppliedLinkVertPoly.Position = linkVertPoly.Position; suppliedLinkVertPoly.Prev = suppliedLinkVertHole; suppliedLinkVertHole.Next = suppliedLinkVertPoly; suppliedLinkVertPoly.Next = linkVertPolyNext; linkVertPolyNext.Prev = suppliedLinkVertPoly; } }
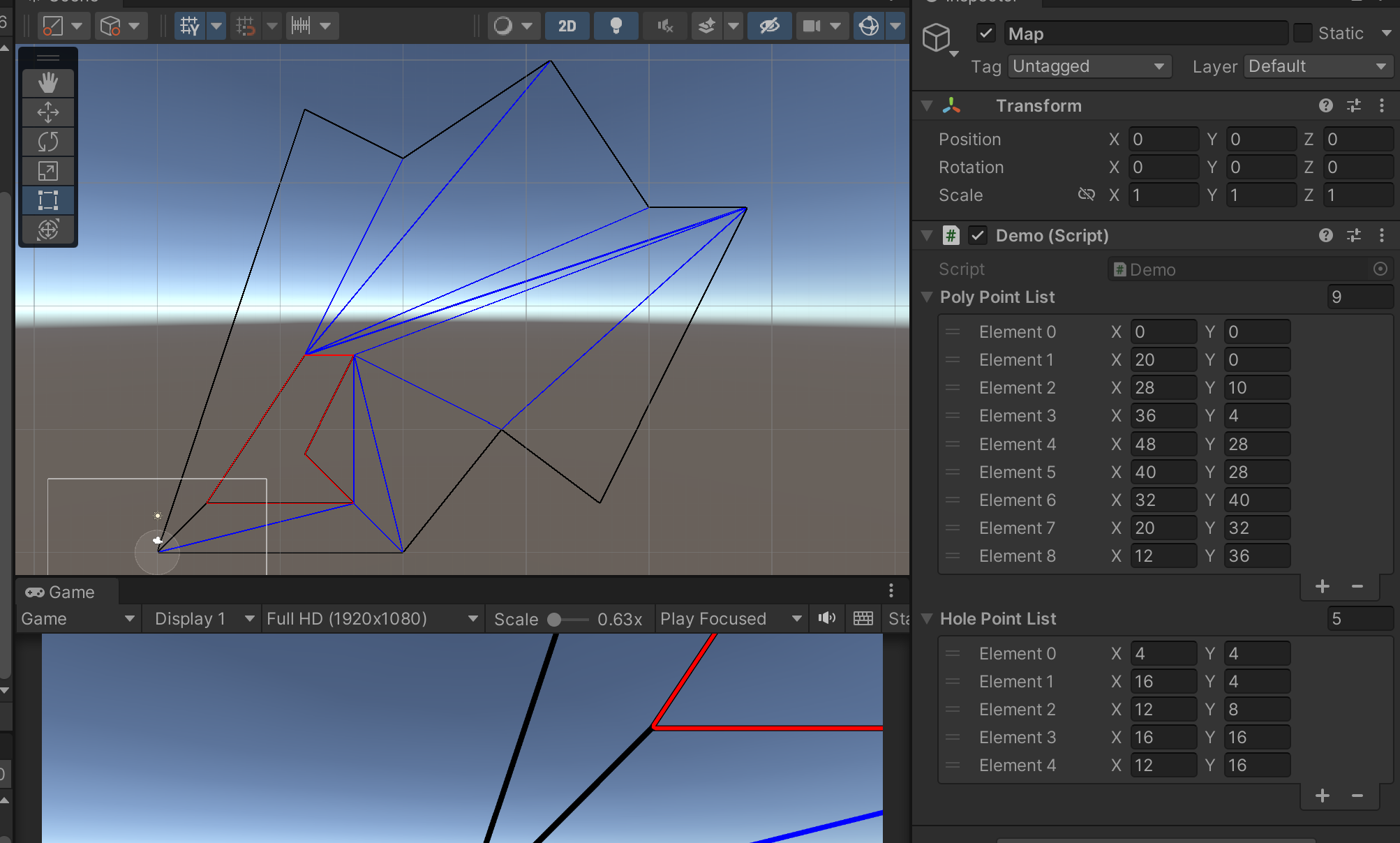
在Unity中展示 当我们完成了全部的计算任务后,就可以在Unity中,将多边形绘制出来了。在这里我利用Unity自带的lineRenderer进行线段的绘制。
再上图中,可以在Inspector窗口编辑多边形$P$以及孔洞$Hole$的个顶点坐标(注意要按照逆时针顺序),用黑色的线绘制出了$P$,用红色的线绘制出了$Hole$,蓝色的线即分割线。注意有一条黑色的线连接了$P$和$Hole$,这即是我们选择来融合$P$和$Hole$的连接线
补充知识 判断一个多边形是否在另一个多边形内部 在MergeHole()方法中有一段代码:
1 2 if (!HasInnerPolygon(hole)) return ;
进行了两个多边形相容性的判断,当$hole$完全被$P$包含时,返回true,并进行后续的融合操作。
而这里如何判断一个多边形是否被另一个多边形包含,是通过判断$hole$中的每个顶点是否在$P$中,若$hole$的全部顶点都在$P$中,则认为$hole$被$P$包含。由此将问题转化为了:如何判断一个顶点是否在一个多边形中。
解决这个问题有一个很经典的方法:
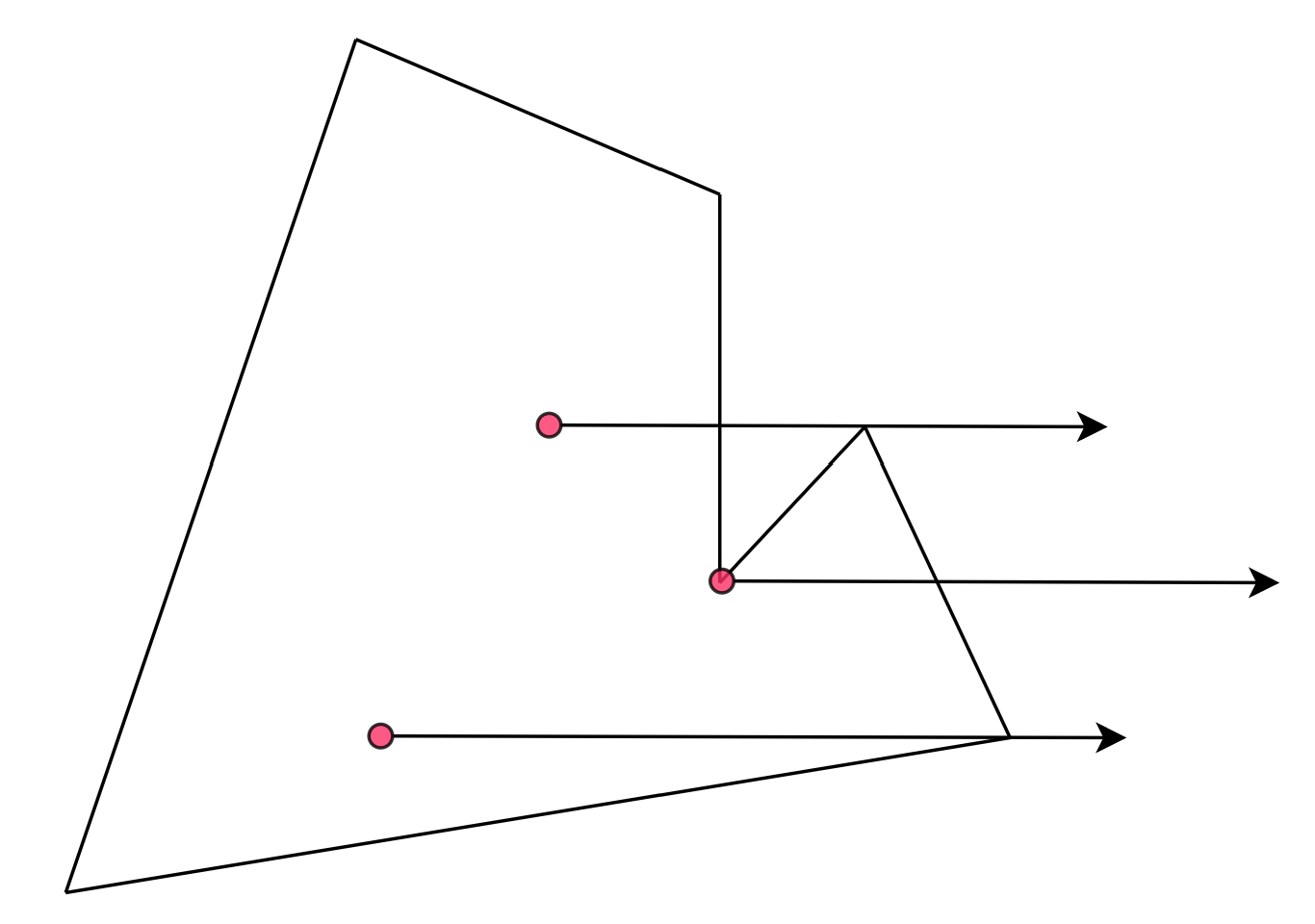
引射线法: 从目标点出发引一条射线(我们可以取水平向右的射线),看这条射线和多边形所有边的交点数目。如果有奇数个交点,则说明在内部,如果有偶数个交点,则说明在外部。
看上去很好实现,只需要$O(n)$枚举多边形的每条边,然后判断是否相交即可,但是其实还是有不少细节的。
例如下图中这种过顶点的情况,如果不确定好统计规则,很容易顶点两条边都被记录一次,导致本在内部被判定为在外部(例如最下方的红点,经过多边形的顶点,会被记为经过了两条边)
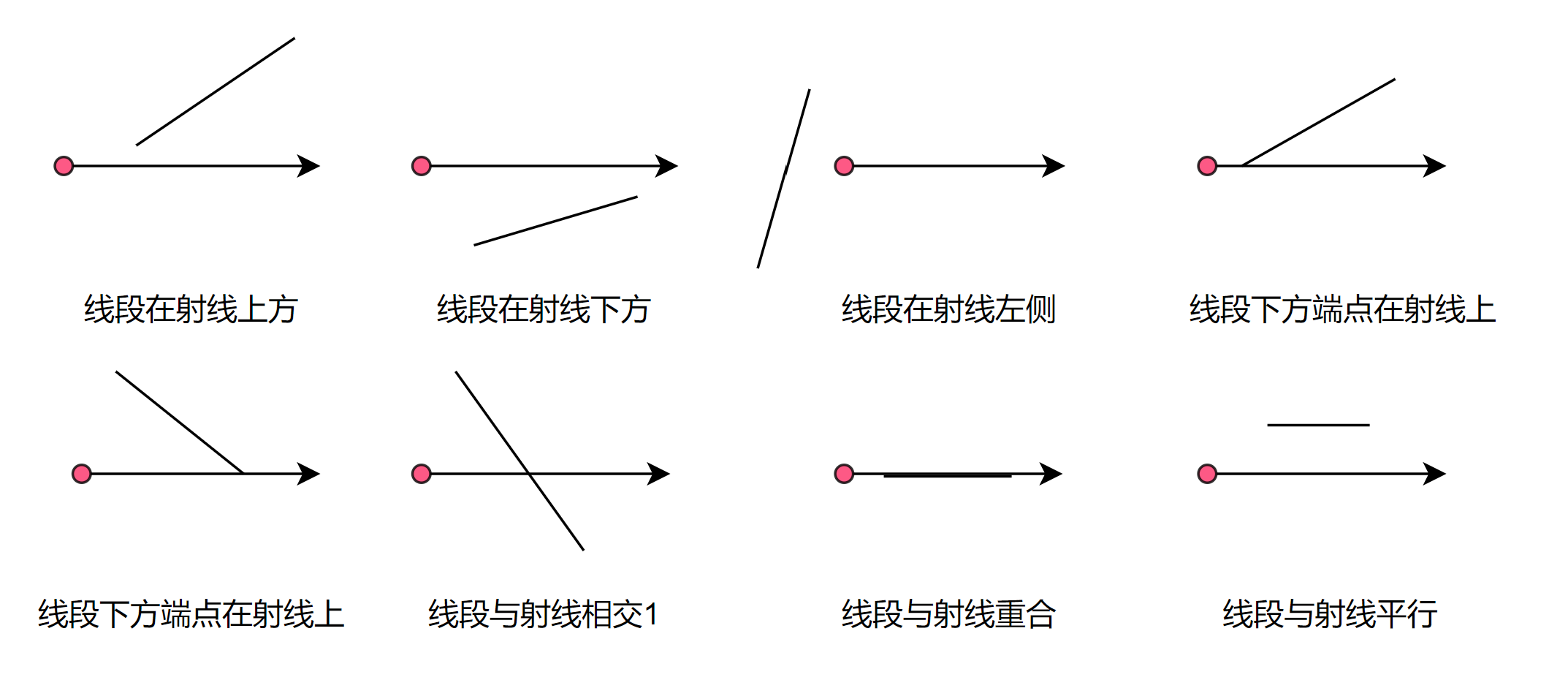
此外,线段与射线的关系可以用下图展示:
我们可以很容易的判断线段在射线的上、下、左、重合/平行。为了处理前面说的过顶点的情况,我们认为经过线段下侧端点的射线与线段不相交。而剩下的就是计算一下线段上对应射线所在$y$坐标点的$x$坐标值,和射线起点的$x$坐标值作比较,如果大于射线起点的$x$坐标,则说明有交点。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 public static bool HorizontalRayIntersectSegment (Vector2 raySource, Vector2 a, Vector2 b ) if (a.y == b.y) return false ; if (a.y > raySource.y && b.y > raySource.y) return false ; if (a.y < raySource.y && b.y < raySource.y) return false ; if ((b.y < a.y && b.y == raySource.y) || (a.y < b.y && a.y == raySource.y)) return false ; if (a.x < raySource.x && b.x < raySource.x) return false ; var x = b.x - (b.x - a.x) * (b.y - raySource.y) / (b.y - a.y); return x >= raySource.x; }
补充阅读 留白- Recast Navigation 源码剖析 01 - Meadow Map论文解析与实验